R-CNN과 풀링
📌 슬라이딩 윈도우(sliding window) 방식
- 객체 인식 알고리즘의 한 종류
- 이미지의 모든 영역을 탐색하면서 객체를 검출해 내는 방식
- 요즘 거의 사용되지 않음
📌 후보 영역(region proposal)
- 선택적 탐색(selective search) 알고리즘을 적용
- 이미지 분류를 수행하는 CNN + 이미지에서 객체가 있을 만한 영역을 제안해 주는 후보 영역 알고리즘을 결합한 알고리즘
📌 분할(segmentation)
- 영상 데이터의 특성(색상, 모양, 무늬 등)에 따라 분할하여 후보 영역을 선정
📌 후보 영역(바운딩 박스)
- 3D 객체의 형태를 모두 포함할 수 있는 최소 크기의 박스
📌 선택적 탐색(selective search) 알고리즘
1. 초기 영역 생성
- 입력된 이미지를 영역 다수로 분할하는 과정

2. 작은 영역의 통합
- 1단계에서 영역 여러 개로 나눈 것들을 비슷한 영역으로 통합
- 그리디 알고리즘을 통하여 비슷한 영역이 하나로 통합될 때까지 반복한다.

3. 후보 영역(바운딩박스) 생성

🐍 R- CNN 학습 절차

1. 이미지를 입력으로 받기
⬇
2. 2000개의 바운딩 박스(bounding box)를 선택적 탐색 알고리즘으로 추출한 후 잘라 내고(cropping), CNN 모델에 넣기 위해 같은 크기(227×227 픽셀)로 통일한다.(warping)
⬇
3. 크기가 동일한 이미지 2000개에 각각 CNN 모델을 적용한다.
⬇
4. 각각 분류를 진행하여 결과를 도출한다.(분류모델 사용)
공간 피라미드 풀링
- 기존 CNN 구조는 완전 연결층을 위해 입력 이미지를 고정하기 때문에 신경망을 통과시키려면 강제로 고차원 -> 저차원으로 감출시키거나 조정을 해야하기 때문에 물체의 일부분이 잘리거나 본래의
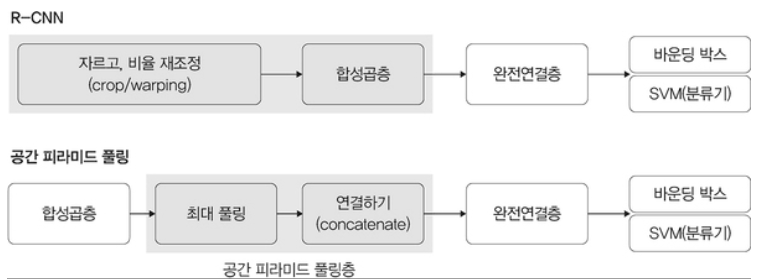
- 입력 이미지의 크기에 관계없이 합성곱층을 통과시키고, 완전연결층에 전달되기 전에 특성 맵들을 동일한 크기로 조절해 주는 풀링층을 적용하는 기법이다.
- 입력 이미지의 크기를 조절하지 않고 합성곱층을 통과시키기 때문에 원본 이미지의 특징이 훼손되지 않는 특성 맵을 얻을 수 있음
Rol 풀링
- 크기가 다른 특성 맵의 영역마다 스트라이드를 다르게 최대 풀링을 적용하여 결괏값 크기를 동일하게 맞추는 방법


- 여기서 박스 하나하나는 하나의 특성 맵(합성곱계층의 입출력 데이터 하나하나)을 의미함
- 1번 8*8 맵에서 선택적으로 후보 맵인 7*5 후보영역을 뽑아내면,
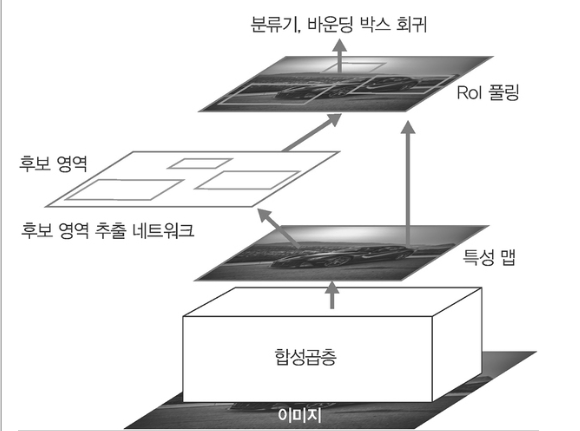
Fast R-CNN
- Fast R-CNN(Fast Region-based CNN)은 R-CNN의 속도 문제를 개선하기 위하여 RoI 풀링을 도입한 모델
- 선택적 탐색에서 찾은 바운딩 박스 정보가 CNN을 통과하면서 유지되도록 하고 최종 CNN 특성 맵은 풀링을 적용하여 완전연결층을 통과하도록 크기를 조작하여 시간을 단축함
- Fast R-CNN에 후보 영역 추출 네트워크(Region Proposal Network, RPN)를 추가한 것

-
후보 영역 추출 네트워크
